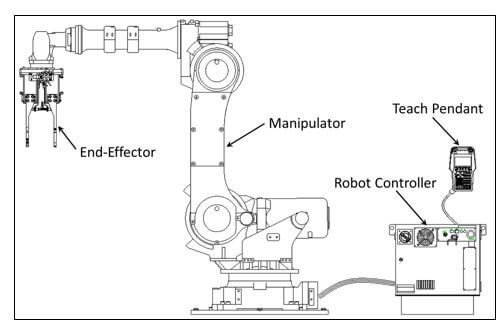
Your Fanuc Robot has general components that should be easily recognizable by you. They are:
Robot Controller: The electrical control panel for the Robot. It contains the CPU, power supplies, operator controls, memory, circuit breaker, servo amplifiers, and IO.
Teach Pendent: The handheld operating station that allows the operator to program recipes, jog the arm, troubleshoot the system, configure the robot, etc.
Manipulator: This is the mechanical robot arm. It is what moves in automated motions. It usually contains 4 or 6 servo motors, one at each joint.
End-Effector (or End-of-Arm-Tooling): This is the adapter device that is engineered to pick up or hold whatever item the robot will be manipulating.
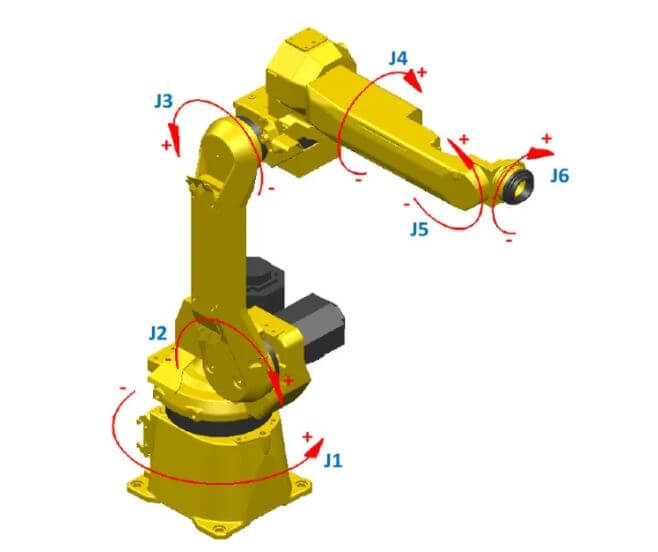
Here are the servo motor joints and their names:
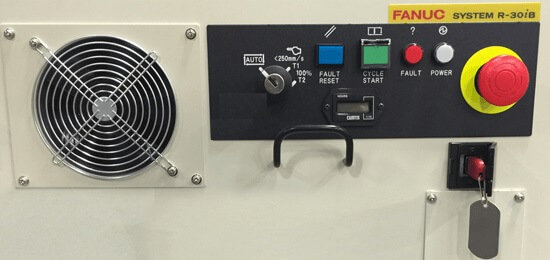
The Robot Controller has several operator pushbuttons and a selector switch on the face of it. Here are the functions from right to left:
Emergency Stop Pushbutton: Removes power from the servo motors and applies the brakes.
White Power Pilot Light: Indicates the robot controller is on.
Red Fault Pilot Light: Indicates a robot fault has occurred.
Green Cycle Start Pushbutton: Starts the robot when the Mode Keyswitch is in Auto mode. The cycle is running when the pilot light is on.
Blue Fault Reset Pushbuttton: Resets the robot fault after corrective action has been taken.
Mode Keyswitch: Two or Three modes (T1, T2, and Auto).
T1 (Test Mode 1): With Pendent Deadman switches pressed and the pendent in Cartesian mode, the robot speed is limited to 250 mm/sec and joint speed at 10% max joint speed. In Joint mode, face plate speed is less than 250 mm/sec. The program speed is limited to the speeds above.
T2 (Test Mode 2): The same from T1 is true except the full program speed is allowed.
Auto Mode: Runs the Robot program from remote commands if all required conditions are satisfied.