How Can We Help?
Jogging Fanuc Robots
|
|
|
Two choices must be made when Jogging Fanuc Robots. They are:
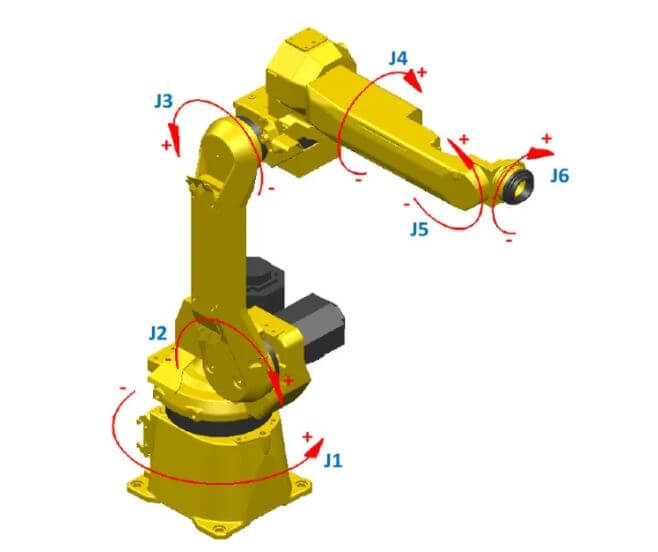
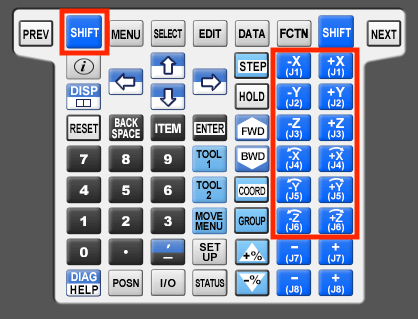
JOGGING IN JOINT MODE
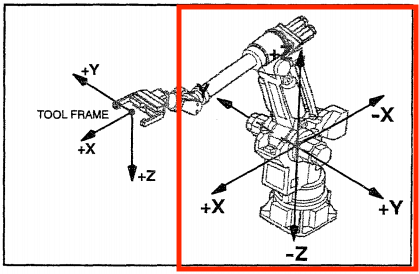
JOGGING IN WORLD FRAME (CARTESIAN MODE)
JOGGING PRE-CHECKS
JOG THE ROBOT
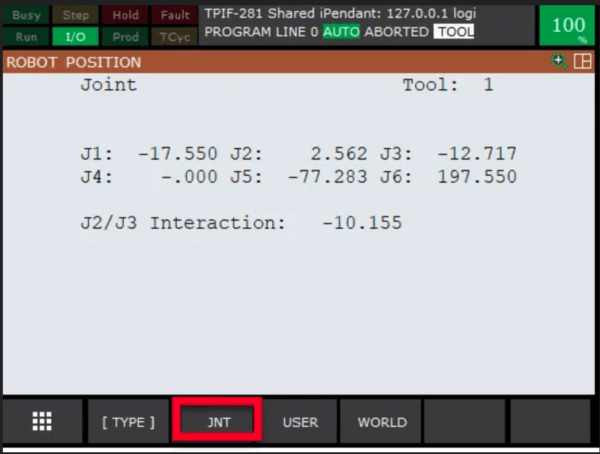
ROBOT POSITION
|
|
|
|
Two choices must be made when Jogging Fanuc Robots. They are:
JOGGING IN JOINT MODE
JOGGING IN WORLD FRAME (CARTESIAN MODE)
JOGGING PRE-CHECKS
JOG THE ROBOT
ROBOT POSITION
|